
 产品:104
产品:104

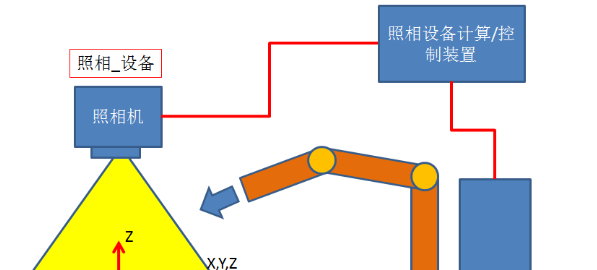
首先,建立机器人的轨迹作为机器人的基本编程轨迹。
视觉捕捉主要通过改变机器人的刀具坐标系或基坐标系来实现。

物体位置的变化主要是其位置的X、Y、Z方向的变化。
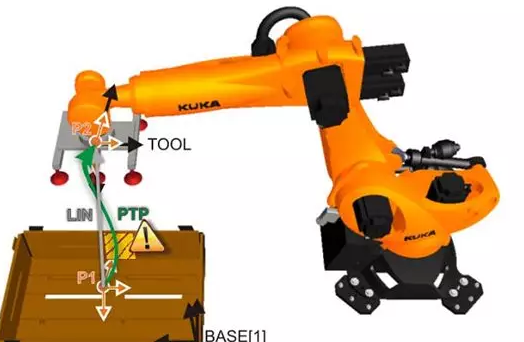
基坐标系:可根据需要定义用户坐标系。当机器人有多个工作站时,可以选择用户坐标系统,使操作更容易。在用户坐标系统中,TCP点将沿着用户定义的轴移动。
以改变BASE 坐标系为例:
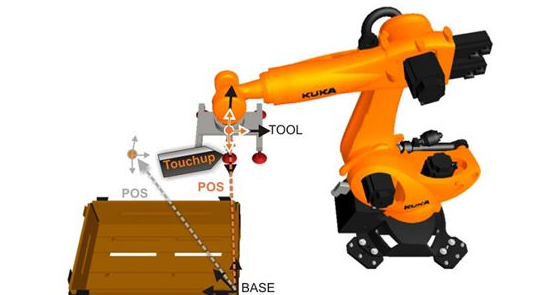
库卡C4 现在可以使用32个BASE 坐标系
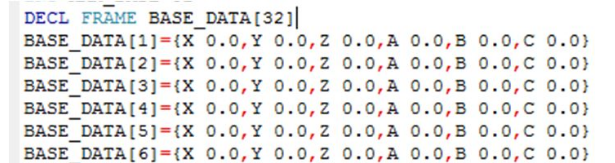
没有使用视觉补偿功能时,只用一个BASE坐标系.

改变机器人BASE坐标系值从而改变机器人抓件位置,使用多个坐标系.

制作一个后台程序,用来改变BASE

设置 输入变量点的接收变量:
SIGNAL gxe_1 $in[2278] TO $in[2285]
SIGNAL gxe_2 $in[2286] TO $in[2301]
SIGNAL gxe_3 $in[2302] TO $in[2309]
SIGNAL gxe_4 $in[2310] TO $in[2325]
SIGNAL gxe_5 $in[2334] TO $in[2341]
SIGNAL gxe_6 $in[2342] TO $in[2357]
设置坐标变量用于改变BASE坐标值
DECL
DECL
DECL
使多个BASE[]坐标系保持一致
base_Data[1] = $base
base_Data[2] = base_data[1]
base_Data[3] = base_data[1]
base_Data[4] = base_data[1]
变量的初始化归0 , get_val_pos = $null
例如: 现在只改变BASE的Y方向位置
get_val_pos.y = gxe_2*0.01 换算坐标值,存到坐标的Y方向.
base_data[1] = $base : Get_Val_Pos 改变BASE坐标系的Y方向位置
使用多个BASE坐标系:

转载于:机器人在线
更多:库卡机器人配件