
 产品:104
产品:104

在机器人的实际使用中,外部遥控是机器人经常用到的启动和停止功能,下面介绍一下KUKA机器人远程控制模式的外部自动运动配置方法,希望对朋友们有所帮助。
在配置外部自动操作之前,首先要完成KUKA机器人Profinet的通信配置。请点击链接观看:KUKA机器人:西门子1200PLC实现与KUKA机器人的Profinet通讯
首先,配置外部自动操作端口
在库卡机器人指导机上依次选择“配置”、“输入/输出终端”和“外部自动运行”,选择需要更改的行,点击“编辑”,填写所需端口地址。

输入字段主要改为“$EXT_START”、“$MOVE_ENABLE”、“CONF_MESS”,
“DRIVES_OFF”、“DRIVES_ON”、“PGNO_TYPE”、“PGNO_LENGTH”
”“PGNO_VALID PGNO_FBIT”、“

“Start Criteria”屏幕的输出主要更改为“$ALARM_STOP”、“$USER_SAF”,
“PERI_RDY”、“I_O_ACTCONF”、“STOPOMESS”
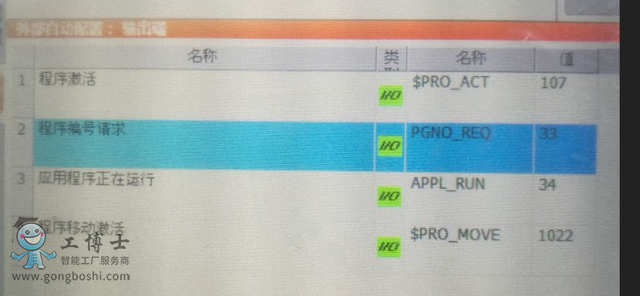
输出“程序状态”接口,主要更改“$PRO_ACT”、“PGNO_REQ”,
“APPL_RUN”

输出“Robot location”界面,主要更改“$IN_HOME”、“$ON_PATH”
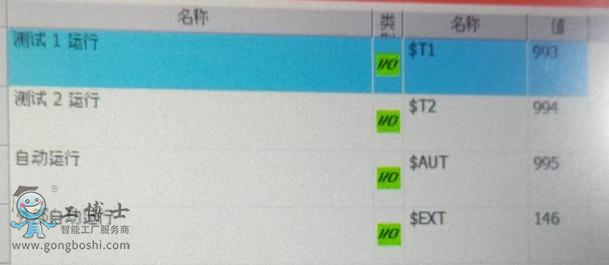
输出端的“运行模式”界面可以保持不变。此处“$EXT”已更改。
2KUKA的外部启动顺序
机器人启动时间顺序:
步骤1:一旦PLC接通电源,发送一个$move_enable信号给机器人。
步骤2:在PLC给出$move_enable信号500ms后,给机器人$drivers_off(总是给出)信号。
步骤3:确定机器人的状态信号,给机器人$drivers_on信号。当机器人收到$drivers_on时,它发送$peri_RDY给PLC, PLC收到这个信号后将断开$drivers_on。
步骤4:判断机器人的状态信号,当PLC向机器人发送$ext_start(脉冲信号),机器人就可以启动。
机器人确认信息:
当机器人有“确认信号”(故障)时,PLC向机器人发送$conf_mess(脉冲信号)进行复位。
机器人外部停止:
禁用机器人$drivers_Off,此停止禁用机器人伺服。停止后继续启动机器人,重复以上步骤2~4再次启动机器人。
三、按启动顺序编制PLC程序


4. 配置单元程序
在robot CELL程序中,在LOOP循环中,添加要加载的程序名,如图Main()所示。

在“T1”模式下,手动加载“CELL”程序,手动将程序运行到“BCO”,将机器人输入到“EXT”,注意调整运行速度到合适的位置。
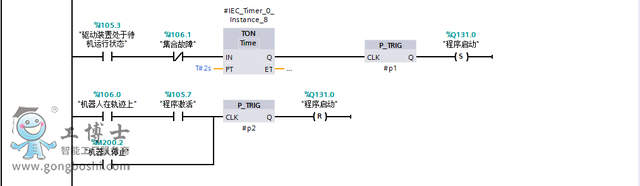
连接“M200.0”机器人连接驱动设备,程序开始运行。
打开“m2002”机器人,断开驱动装置,程序停止。
再次将“M200.0”机器人连接到驱动程序,程序继续运行。
如果出现“确认信号”(故障),则打开“m2001”以消除故障。